Quick Start¶
The following chapter describes the basic functions of Moddy by using the example Hello tutorial model.
In a Moddy model, a system is composed of parts that communicate with other parts through messages. In the Hello tutorial, we simulate a conversation between two people, “Bob” and “Joe”, therefore “Bob” and “Joe” are the two parts used in the model.
Note
This example uses only only of two modelling flavours, the “event based” method. Using this method, the model reacts to events using callback routines.
Another modelling technique is the “program based” method. See Hello Demo as a Sequential Program as an example and Sequential Program Simulation for more information.
Model Structure¶
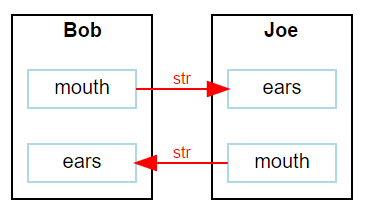
The structure of the system is modelled via parts, ports and bindings between ports. In the Hello tutorial, we have two parts, Bob and Joe. Each part has an output port (mouth) and an input port (ears).
To simulate the time that Bob and Joe need for thinking, we create also a timer for both. To model the behavior of Bob, we define a class “Bob”, which creates the ports and timers:
import moddy
class Bob(moddy.SimPart):
''' Model of Bob '''
def __init__(self, sim, obj_name):
# Initialize the parent class
super().__init__(sim=sim, obj_name=obj_name,
elems={'in': 'ears',
'out': 'mouth',
'tmr': 'think_tmr'})
...
The main program creates an instance of Bob and Joe like this
SIMU = moddy.Sim()
Bob(SIMU, "Bob")
Joe(SIMU, "Joe")
To allow Joe to hear what Bob says, we “bind” the ears of Joe to the mouth of Bob and vice versa.
SIMU.smart_bind([['Bob.mouth', 'Joe.ears'], ['Bob.ears', 'Joe.mouth']])
Moddy can also output the structure of the model. After you created the structure, call gen_dot_structure_graph():
# Output model structure graph
moddy.gen_dot_structure_graph(SIMU, 'output/1_hello_structure.svg')
This is the resulting structure graph:
Model Behavior¶
To model the behavior of parts, an event based model:
Sends messages to other parts
Reacts on received messages from other parts
Reacts on timer events
This means, the simulator calls the model code only whenever such an event occurs. For example, Bob’s behavior will be modelled as follows:
...
def ears_recv(self, _, msg):
''' Callback for message reception on ears port '''
if msg == "Hi, How are you?":
self.reply = "How are you?"
else:
self.reply = "Hm?"
self.think_tmr.start(1.4)
self.set_state_indicator("Think")
def think_tmr_expired(self, _):
''' Callback for think_tmr expiration '''
self.set_state_indicator("")
# pylint: disable=no-member
self.mouth.send(self.reply, 1)
Ports and Messages¶
A message is send always from an “Output Port” to an “Input Port”.
A part can have many Ports to communicate with other parts.
A message is send via the sending port’s send() method:
self.mouth.send(self.reply, 1)
In this example, self.reply is the message; here it is a string. The second parameter defines the flight time, i.e. how long it takes until the message arrives at the input port. On the receiver side, the part that owns the input port must define a “receive function”, which gets passed the message just received:
def ears_recv(self, _, msg):
''' Callback for message reception on ears port '''
if msg == "Hi, How are you?":
self.reply = "How are you?"
else:
self.reply = "Hm?"
self.think_tmr.start(1.4)
self.set_state_indicator("Think")
Note
This receive routine must be called always <portName>_recv.
Timers¶
A part can have many timers to control its own behavior. A timer is stopped by default.
def think_tmr_expired(self, _):
''' Callback for think_tmr expiration '''
self.set_state_indicator("")
self.mouth.send(self.reply, 1)
Note
The expiration routine must be called always <timerName>_expired.
Running Simulator¶
After the parts and bindings were created, the simulator can run()
# let simulator run
SIMU.run(stop_time=12.0)
Here we stop the simulator after 12 seconds. If no limit is given, the simulator would run until no more events to execute. On the python console, the simulator outputs the simulation trace:
TRC: 0.0s >MSG Bob.mouth(OutPort) // req=0.0s beg=0.0s end=1.0s dur=1.0s msg=[Hi Joe]
SIM: Simulator 1.6.1 starting
TRC: 1.0s <MSG Joe.ears(InPort) // req=0.0s beg=0.0s end=1.0s dur=1.0s msg=[Hi Joe]
TRC: 1.0s ANN Joe(Part) // got message Hi Joe
TRC: 1.0s T-START Joe.thinkTmr(Timer) // 2.0s
TRC: 1.0s STA Joe(Part) // Think
TRC: 3.0s T-EXP Joe.thinkTmr(Timer)
TRC: 3.0s STA Joe(Part) //
TRC: 3.0s >MSG Joe.mouth(OutPort) // req=3.0s beg=3.0s end=4.5s dur=1.5s msg=[Hi, How are you?]
TRC: 4.5s <MSG Bob.ears(InPort) // req=3.0s beg=3.0s end=4.5s dur=1.5s msg=[Hi, How are you?]
TRC: 4.5s T-START Bob.thinkTmr(Timer) // 1.4s
TRC: 4.5s STA Bob(Part) // Think
TRC: 5.9s T-EXP Bob.thinkTmr(Timer)
TRC: 5.9s STA Bob(Part) //
TRC: 5.9s >MSG Bob.mouth(OutPort) // req=5.9s beg=5.9s end=6.9s dur=1.0s msg=[How are you?]
TRC: 6.9s <MSG Joe.ears(InPort) // req=5.9s beg=5.9s end=6.9s dur=1.0s msg=[How are you?]
TRC: 6.9s ANN Joe(Part) // got message How are you?
TRC: 6.9s T-START Joe.thinkTmr(Timer) // 2.0s
TRC: 6.9s STA Joe(Part) // Think
TRC: 8.9s T-EXP Joe.thinkTmr(Timer)
TRC: 8.9s STA Joe(Part) //
TRC: 8.9s >MSG Joe.mouth(OutPort) // req=8.9s beg=8.9s end=10.4s dur=1.5s msg=[Fine]
TRC: 10.4s <MSG Bob.ears(InPort) // req=8.9s beg=8.9s end=10.4s dur=1.5s msg=[Fine]
TRC: 10.4s T-START Bob.thinkTmr(Timer) // 1.4s
TRC: 10.4s STA Bob(Part) // Think
TRC: 11.8s T-EXP Bob.thinkTmr(Timer)
TRC: 11.8s STA Bob(Part) //
TRC: 11.8s >MSG Bob.mouth(OutPort) // req=11.8s beg=11.8s end=12.8s dur=1.0s msg=[Hm?]
SIM: Stops because stop_time reached
SIM: Simulator stopped at 12.0s. Executed 9 events in 0.001 seconds
saved sequence diagram in output/1_hello.html as iaViewer
Saved structure graph to output/1_hello_structure.svg
saved output/1_hello.csv as CSV
Generating the Sequence Diagram¶
Moddy can generate a sequence diagram from the simulation results.
The sequence diagram is generated as a as HTML.
After simulation run, the following code generates the sequence diagram.
For details, see gen_interactive_seq_diagram():
moddy.gen_interactive_sequence_diagram(SIMU,
file_name="output/1_hello.html",
time_per_div=1.0,
pix_per_div=30,
title="Hello Demo")
This is the result:
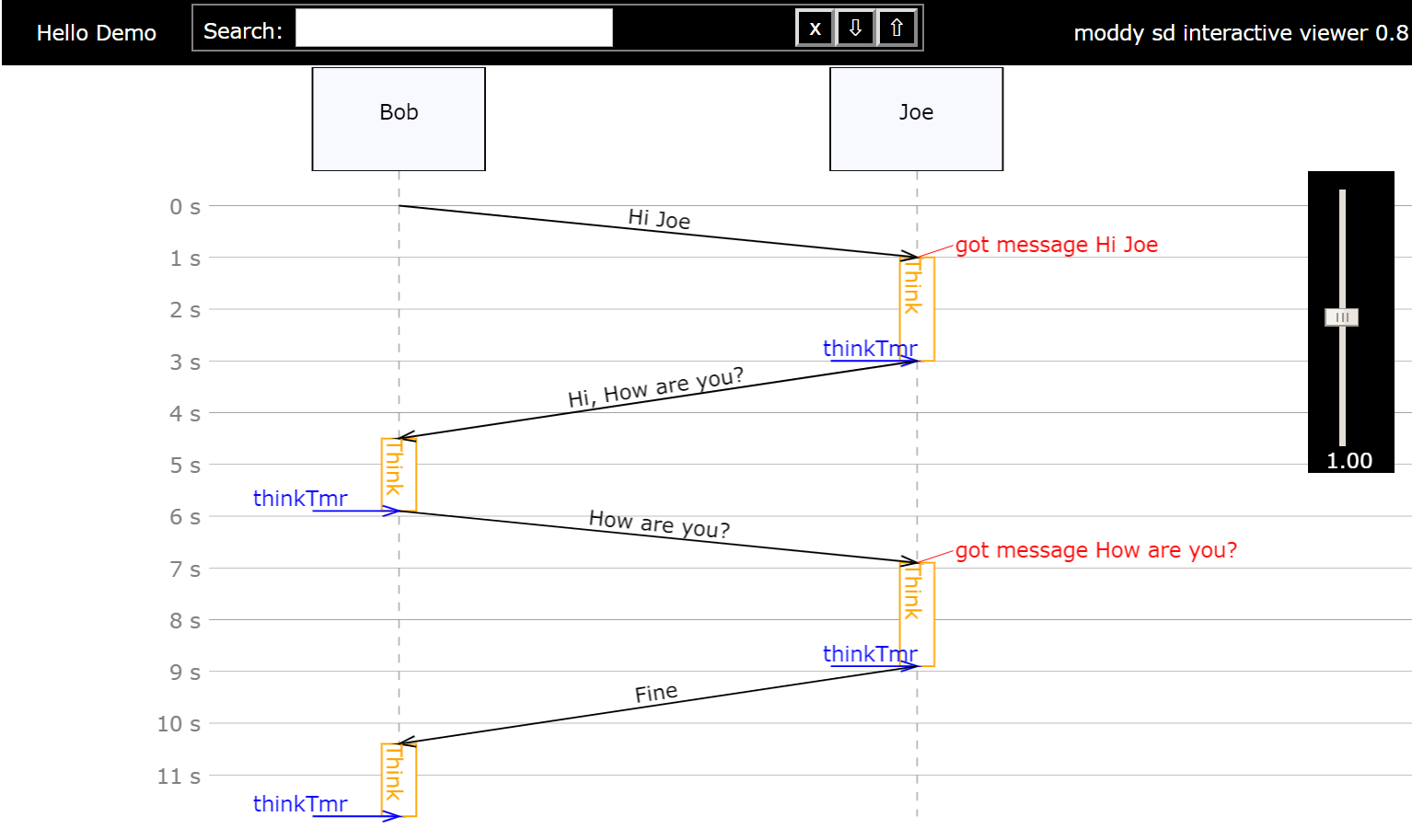
View as HTML: 1_hello
Notes:
The black arrows are messages
The blue arrows are timer expiration events
The orange boxes are visualized “states” or “activities” that were generated by the model via
set_state_indicator().The red messages are annotations that were generated by the model via
annotation()